

CHAPTER 4
METHODOLOGY
1. Vertical Motion
Drones use rotors for propulsion and control. A rotor as a lover, because they work just about an equivalent. Spinning blades push air down. Of course, all forces are available pairs, which means that because the rotor pushes down on the air, the air pushes abreast of the rotor. this is often the essential idea behind lift, which comes right down to controlling the upward and downward force. The faster the rotors spin, the greater the lift, and vice-versa.
Now, a drone can do three things within the vertical plane: hover, climb or descend. To hover, the internet thrust of the four rotors pushing the drone up must be adequate to the gravity pulling it down. Easy. So what about moving up, which pilots call climbing? Just increase the thrust (speed) of the four rotors so that there’s a non-zero upward force that’s greater than the load. then, you’ll decrease the thrust a touch bit—but there are now three forces on the drone: weight, thrust, and air drag. So, you’ll still need for the thrusters to be greater than just a hover.

2. Turning (Rotating)
Let’s say you’ve got a hovering drone pointed north and you would like to rotate it to face east. How does one accomplish this by changing the facility to four rotors? Before answering, I will be able to draw a diagram of the rotors (viewed from above) labeled 1 through 4.
In this configuration, the red rotors are rotating counterclockwise and therefore the green ones are rotating clockwise. With the 2 sets of rotors rotating in opposite directions, the entire momentum is zero. momentum may be a lot like linear momentum, and you calculate it by multiplying the angular velocity by the instant of inertia. Wait. what’s the instant of inertia? it’s almost like the mass, except it deals with rotation. Yes, it gets rather complicated, but all you would like to understand is that the momentum depends on how briskly the rotors spin.
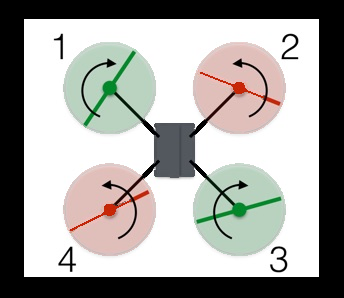
Fig. 5 Actual Motor working
If there’s no torque on the system (the system here being the drone), then the entire momentum must remain constant (zero during this case). Just to form things easier to know, I will be able to say the red counterclockwise rotors have a positive momentum and therefore the green clockwise rotors have negative momentum. I’ll assign each rotor a worth of +2, +2, -2, -2, which adds up to zero (I left off the units).
Let’s say you would like to rotate the drone to the proper. Suppose I decrease the angular velocity of rotor 1 such now it’s a momentum of -1 rather than -2. If nothing else happened, the entire momentum of the drone would now be +1. Of course, that can’t happen. therefore the drone rotates clockwise so that the body of the drone has a momentum of -1. Boom. Rotation.
But wait! Decreasing the spin of rotor 1 did indeed cause the drone to rotate, but it also decreased the thrust from rotor 1. Now internet upward force doesn’t equal gravity, and therefore the drone descends. Worse, the thrust forces aren’t balanced, therefore the drone tips downward within the direction of rotor 1. don’t be concerned. I can fix this.
To rotate the drone without creating all those other problems, decrease the spin of rotors 1 and three and increase the spin for rotors 2 and 4. The momentum of the rotors still doesn’t add up to zero, therefore the drone body must rotate. But the entire force remains adequate to the gravity and therefore the drone continues to hover. Since the lower thrust rotors are diagonally opposite from one another, the drone can still stay balanced.
3. Forwards and Sideways
What is the difference between moving forward or backward? None, because the drone is symmetrical. an equivalent holds for side-to-side motion. Basically, a quadcopter drone is sort of a car where every side is that the front. this suggests that explaining the way to move forward also explains the way to withdraw or to either side.
To fly forward, I want a forward component of thrust from the rotors. Here may be a view (with forces) of a drone moving at a continuing speed.
A quadcopter drone, also known as a quadrotor, is a type of unmanned aerial vehicle (UAV) that is lifted and propelled by four rotors. This type of drone has become increasingly popular in recent years due to its stability, ease of control, and versatility. In this report, we will discuss the methodology of quadcopter drones in detail, including the components, design, control, and navigation.

4. Design
The design of a quadcopter drone is optimized for stability and maneuverability. The four motors are positioned at the corners of the frame and are angled to provide lift and propulsion. The flight control system is typically located in the center of the frame and includes a gyroscope, accelerometer, and other sensors that help to maintain stability and control the drone’s movements. The battery provides power to the motors and other components, and is typically designed to be easily replaceable.
Control: The control of a quadcopter drone is achieved through the use of a radio-controlled transmitter. The pilot uses the transmitter to send commands to the drone, such as adjusting the speed of the motors or changing the orientation of the drone. The flight control system receives these commands and adjusts the speed of the motors accordingly, helping to maintain stability and control the drone’s movements.
5. Navigation
The navigation of a quadcopter drone is achieved through the use of GPS and other sensors. The drone’s flight control system uses GPS to determine its location and orientation, while sensors such as accelerometers and gyroscopes help to maintain stability and control the drone’s movements. Some quadcopter drones also include cameras and other sensors that can be used for aerial photography, mapping, and other applications.
Safety Considerations: When using a quadcopter drone, it is important to follow all local regulations and guidelines regarding their use, particularly with respect to flying in restricted airspace. Additionally, it is important to always be aware of your surroundings and take precautions to avoid collisions with other aircraft, people, and objects on the ground. It is also important to keep the drone in sight at all times and to avoid flying in adverse weather conditions such as high winds or heavy rain.

6. Future Developments
The future of quadcopter drones is bright, with many new technologies and applications emerging all the time. One of the most exciting areas of development is the integration of artificial intelligence and machine learning, which will allow drones to operate more autonomously and efficiently. Additionally, the use of electric power is becoming increasingly common, reducing the environmental impact of UAVs and improving their efficiency.
7. Component:
The main components of a quadcopter drone include a frame, four motors, four propellers, a flight control system, a battery, and a radio-controlled transmitter. The frame is typically made of lightweight materials such as carbon fiber or plastic and is designed to protect the internal components while allowing for easy access to the battery and flight control system. The four motors are responsible for providing the lift and propulsion necessary to keep the drone in the air. The propellers are attached to the motors and provide the necessary lift and forward motion.
The Components which is employed for creating Quadcopter Drone:
- Frame: There are two possibilities when it involves a frame for your drone. you’ll make it yourself or pip out in a web store, and for a good choice of high-quality frames, we propose finding out our article about the best drone frames. If you opt to create it yourself, the project isn’t that difficult, but you’ll need some engineering knowledge and knowledge of the materials you’re getting to use. as example, you’ll use metal (something light), plastic, or maybe wood slats. If you decide on a wooden frame, you’ll need a wooden board that is about 2.5 cm thick.
- Motors: For a standard quad, you’ll need 4 motors in total, but an octocopter requires eight motors to fly. the advice is to use brushless motors – they’re lighter on the battery and, unless you’re an engineer who completely understands how a motor works, these pieces should be bought from a store. you’ll also get more conversant with them by reading our article about drone motors.
- ESCs or electronic speed control: These also are essential pieces of your drone as they’re responsible for delivering power to the motors. Again, their number depends on the number of arms your drone goes to possess.

Fig. 6 ECS or Circuit of Quadcopter Drone
- Propellers: When trying to find the propellers, you want to find those that match the frame of your drone. concentrate on materials – you won’t find wooden propellers, but you want to confirm those you select are an honest fit.

Fig. 7 Propellers of Drone
- Connectors: you’ll need 3.5 mm connectors to weld the motors and ESCs, also as 4.5 mm connectors for the facility distribution board.
- The power distribution board: This board connects the electronic speed controls to the battery.
- Batteries: When purchasing the batteries for your drone, you would like to think about the capacity of A battery and its type. the foremost used batteries for this purpose are Li-Po batteries and their power differs. to possess a way better insight on this subject, we strongly suggest finding out our article about drone batteries.
- Battery Monitor: This is often not an elementary item, but the monitor is sort of useful in warning you when the batteries are on the brink of finishing. In this manner, you don’t risk having the drone remain out of juice within the air, over a pond. A battery monitor ensures that your aerial vehicle won’t die within the most inopportune place.
- Mounting pad: It reduces the vibrations, and thus improves the flight. This one is extremely useful especially if you’re trying to require pictures or videos together with your DIY drone.
- Controller: This device shares the facility and commands the motors at an equivalent time.
- RC receiver: In fact, if you’ve got a transmitter (which is typical with you), you’ll even have a receiver mounted on the drone.
- Camera: If you would like to require aerial photos and record the environment while flying your drone, you’ll need a camera. the simplest cameras are people who can take the standard 4K videos, but everyone will find one consistent with their needs. For high-quality aerial photography and videography, you would possibly also need a gimbal for the camera.
- USB key: this is often necessary to save lots of photos and videos.







