
Vertical Motion
Drones use rotors for propulsion and control. A rotor as a fan, because they work pretty much the same. Spinning blades push air down. Of course, all forces come in pairs, which mean that as the rotor pushes down on the air, the air pushes up on the rotor. This is the basic idea behind lift, which comes down to controlling the upward and downward force. The faster the rotors spin, the greater the lift, and vice-versa.
Now, a drone can do three things in the vertical plane: hover, climb, or descend. To hover, the net thrust of the four rotors pushing the drone up must be equal to the gravitational force pulling it down. Easy. So what about moving up, which pilots call climbing? Just increase the thrust (speed) of the four rotors so that there is a non-zero upward force that is greater than the weight. After that, you could decrease the thrust a little bit—but there are now three forces on the drone: weight, thrust, and air drag. So, you will still need for the thrusters to be greater than for just a hover.
Turning (Rotating)
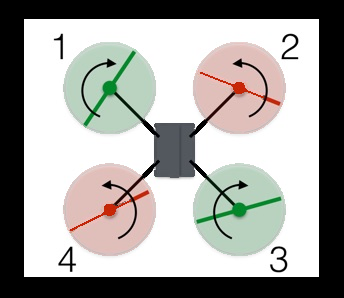
Let’s say you have a hovering drone pointed north and you want to rotate it to face east. How do you accomplish this by changing the power to the four rotors? Before answering, I will draw a diagram of the rotors (viewed from above) labeled 1 through 4.
Actual Motor Working
In this configuration, the red rotors are rotating counterclockwise and the green ones are rotating clockwise. With the two sets of rotors rotating in opposite directions, the total angular momentum is zero. Angular momentum is a lot like linear momentum, and you calculate it by multiplying the angular velocity by the moment of inertia. Wait. What is the moment of inertia? It is similar to the mass, except it deals with rotation. Yes, it gets rather complicated, but all you need to know is that the angular momentum depends on how fast the rotors spin. If there is no torque on the system (the system here being the drone), then the total angular momentum must remain constant (zero in this case). Just to make things easier to understand, I will say the red counterclockwise rotors have a positive angular momentum and the green clockwise rotors have a negative angular momentum. I’ll assign each rotor a value of +2, +2, -2, -2, which adds up to zero (I left off the units).
Let’s say you want to rotate the drone to the right. Suppose I decrease the angular velocity of rotor 1 such that now it has an angular momentum of -1 instead of -2. If nothing else happened, the total angular momentum of the drone would now be +1. Of course, that can’t happen. So the drone rotates clockwise so that the body of the drone has an angular momentum of -1. Boom. Rotation.
To rotate the drone without creating all those other problems, decrease the spin of rotor 1 and 3 and increase the spin for rotors 2 and 4. The angular momentum of the rotors still doesn’t add up to zero, so the drone body must rotate. But the total force remains equal to the gravitational force and the drone continues to hover. Since the lower thrust rotors are diagonally opposite from each other, the drone can still stay balanced.
Forwards and Sideways
What is the difference between moving forward or backward? None, because the drone is symmetrical. The same holds true for side-to-side motion. Basically a quad copter drone is like a car where every side is the front. This means that explaining how to move forward also explains how to move back or to either side.
In order to fly forward, I need a forward component of thrust from the rotors. Here is a side view (with forces) of a drone moving at a constant speed.









